

-
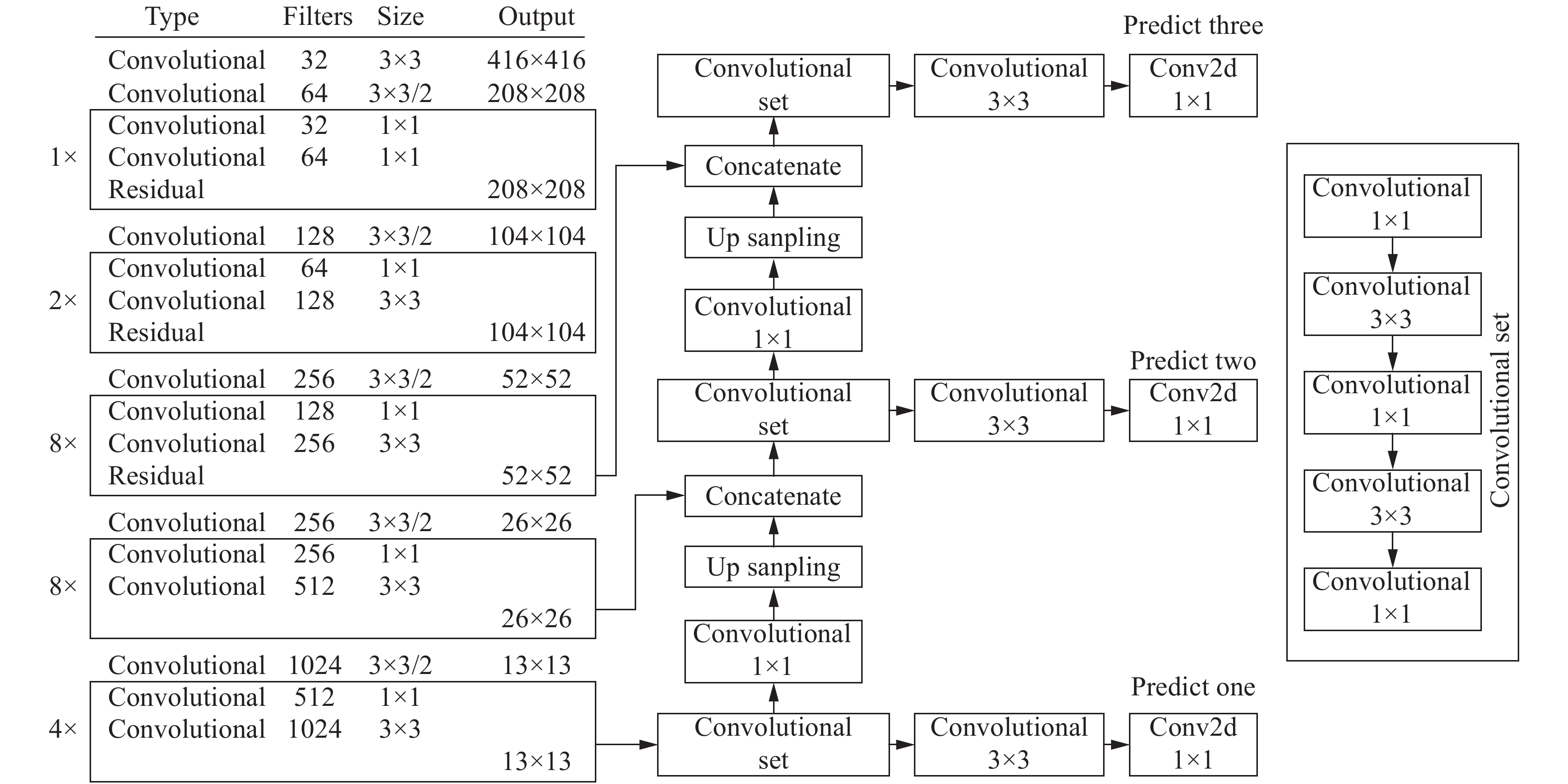
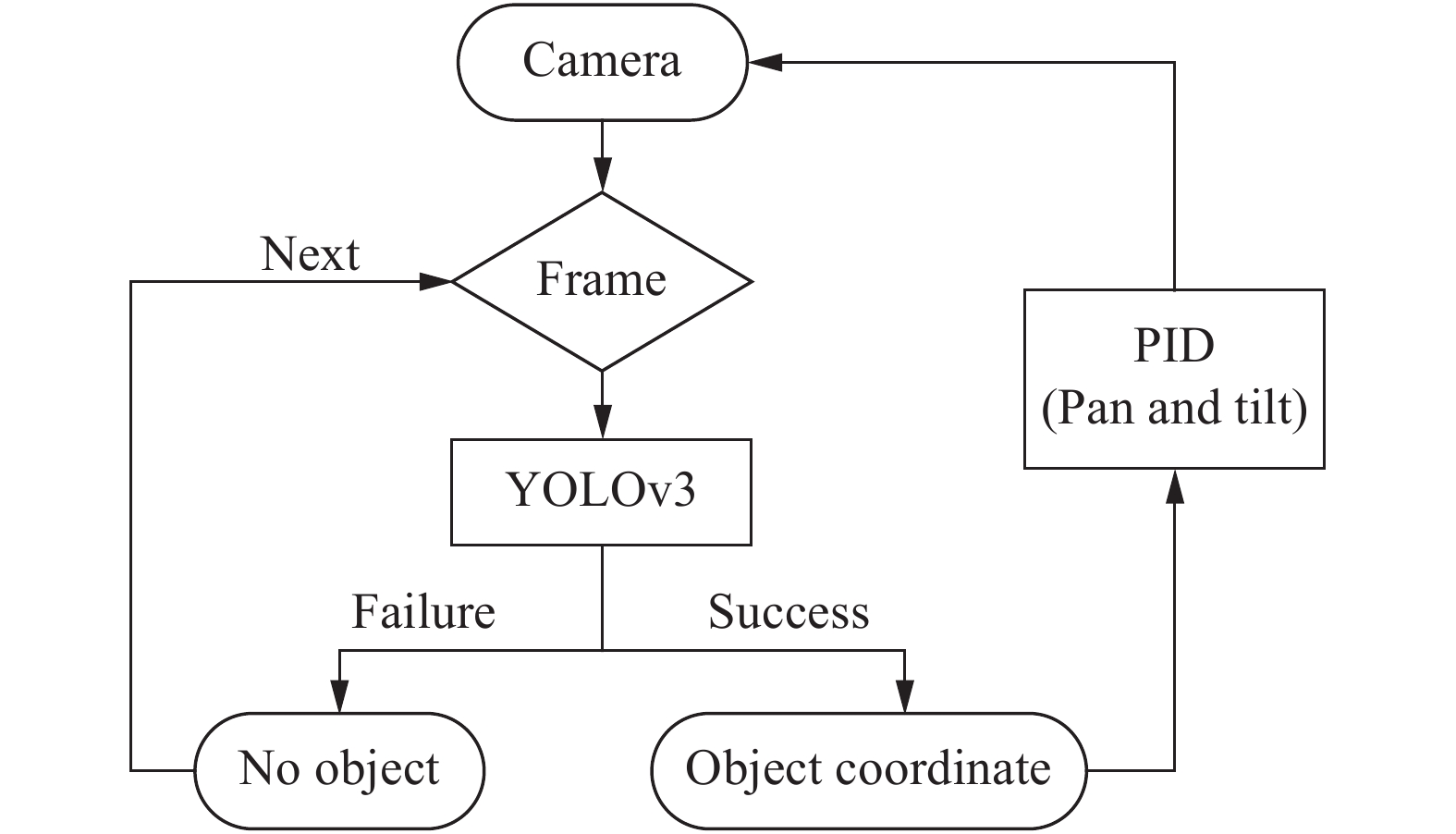
摘要: 近年來,無人機入侵的事件經常發生,無人機跌落碰撞的事件也屢見不鮮,在人群密集的地方容易引發安全事故,所以無人機監測是目前安防領域的研究熱點。雖然目前有很多種無人機監測方案,但大多成本高昂,實施困難。在5G背景下,針對此問題提出了一種利用城市已有的監控網絡去獲取數據的方法,基于深度學習的算法進行無人機目標檢測,進而識別無人機,并追蹤定位無人機。該方法采用改進的YOLOv3模型檢測視頻幀中是否存在無人機,YOLOv3算法是YOLO(You only look once,一次到位)系列的第三代版本,屬于one-stage目標檢測算法這一類,在速度上相對于two-stage類型的算法有著明顯的優勢。YOLOv3輸出視頻幀中存在的無人機的位置信息。根據位置信息用PID(Proportion integration differentiation,比例積分微分)算法調節攝像頭的中心朝向追蹤無人機,再由多個攝像頭的參數解算出無人機的實際坐標,從而實現定位。本文通過拍攝無人機飛行的照片、從互聯網上搜索下載等方式構建了數據集,并且使用labelImg工具對圖片中的無人機進行了標注,數據集按照無人機的旋翼數量進行了分類。實驗中采用按旋翼數量分類后的數據集對檢測模型進行訓練,訓練后的模型在測試集上能達到83.24%的準確率和88.15%的召回率,在配備NVIDIA GTX 1060的計算機上能達到每秒20幀的速度,可實現實時追蹤。Abstract: In recent years, increasing incidents of drone intrusion have occurred, and the drone collisions have become common. As a result, accidents may occur in densely populated areas. Therefore, drone monitoring is an important research topic in the field of security. Although many types of drone monitoring programs exist, most of them are costly and difficult to implement. To solve this problem, in the 5G context, this study proposed a method of using a city’s existing monitoring network to acquire data based on a deep learning algorithm for drone target detection, constructing a recognizable drone, and tracking the unmanned aerial vehicle. The method used the improved YOLOv3 (You only look once) model to detect the presence of drones in video frames. The YOLOv3 algorithm is the third generation version of the YOLO series, belonging to the one-stage target detection algorithm. This algorithm has significant advantages over the two-stage type of algorithm in speed. YOLOv3 outputs the position information of the drone in the video frame. According to the position information, the PID (Proportion integration differentiation) algorithm was used to adjust the center of the camera to track the drone. Then, the parameters of the plurality of cameras were used to calculate the actual coordinates of the drone, thereby realizing the positioning. We built the dataset by taking photos of the drone's flight, searching and downloading drone pictures from the Internet, and labeling the drones in the image by using the labelImg tool. The dataset was classified according to the number of rotors of the drone. In the experiment, the detection model was trained by the dataset classified by the number of rotors. The trained model can achieve 83.24% accuracy and 88.15% recall rate on the test set, and speed of 20 frames per second on the computer equipped with NVIDIA GTX 1060 for real-time tracking.
-
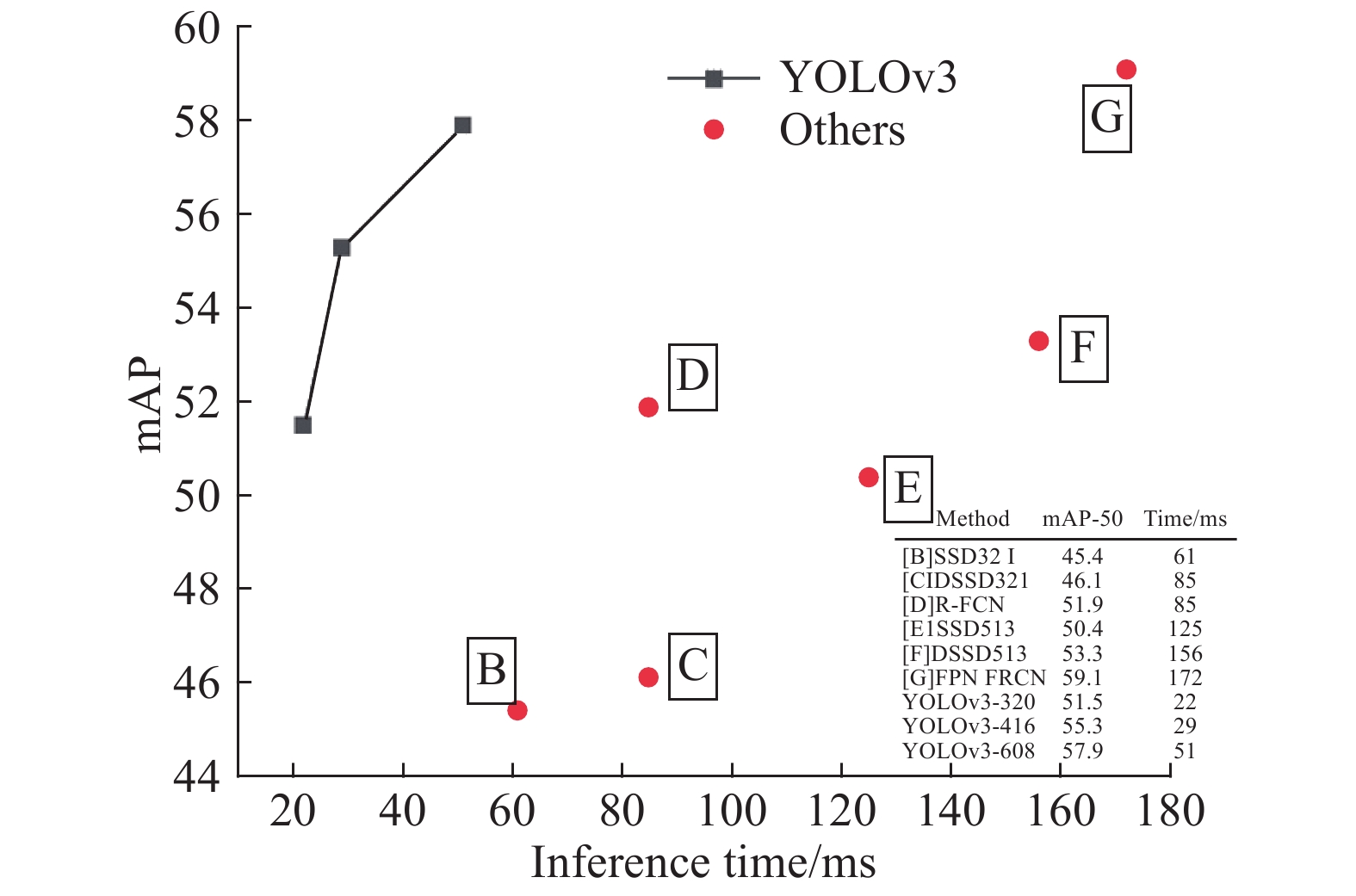
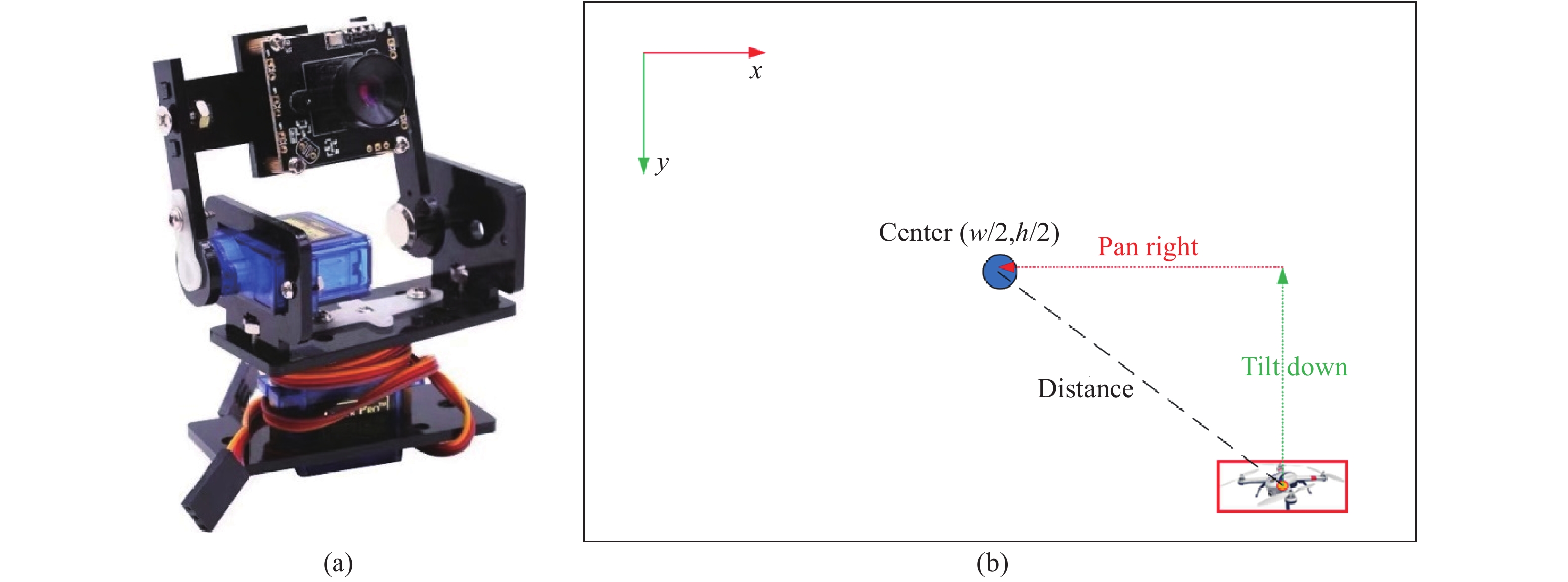
圖 3 云臺相機原理圖。(a)二軸云臺相機;(b)PID控制攝像頭追蹤無人機
Figure 3. Schematic of pan and tile camera: (a) pan and tile camera;(b) tracking drones with PID control

圖 6 SSD及YOLOv3的檢測結果(圖片上方是SSD模型的檢測結果,下方是YOLOv3的檢測結果)
Figure 6. SSD and YOLO’s test results (Above the picture is the test result of the SSD model, below is the test result of YOLOv3)
中文字幕在线观看表 1 模型的準確率和召回率
Table 1. Precision and recall of model
Index Counts Categories Accuracy/% Recall/% 1 150 Single rotor 88.00 86.00 2 155 Four rotors 78.06 92.23 3 158 Multiple rotors 83.54 86.16 Average 83.24 88.15  下載: 導出CSV
下載: 導出CSV
-
參考文獻
[1] Dimitropoulos K, Grammalidis N, Gragopoulos I, et al. Detection, tracking and classification of vehicles and aircraft based on magnetic sensing technology. Int J Appl Math Comput Sci, 2006, 1: 195 [2] de Haag M U, Bartone C G, Braasch M S. Flight-test evaluation of small form-factor LiDAR and radar sensors for sUAS detect-and-avoid applications // 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC). Sacramento, 2016: 1 [3] Saqib M, Khan S D, Sharma N, et al. A study on detecting drones using deep convolutional neural networks // 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). Lecce, 2017: 1 [4] Aker C, Kalkan S. Using deep networks for drone detection // 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). Lecce, 2017: 1 [5] Ganti S R, Kim Y. Implementation of detection and tracking mechanism for small UAS // 2016 International Conference on Unmanned Aircraft Systems (ICUAS). Arlington, 2016: 1254 [6] Nam H, Han B. Learning multi-domain convolutional neural networks for visual tracking // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, 2016: 4293 [7] Zhang D, Maei H, Wang X, et al. Deep reinforcement learning for visual object tracking in videos[J/OL]. arXiv preprint (2017-04-10)[2019-09-10]. https://arxiv.org/abs/1701.08936 [8] Xi X, Yu Z, Zhan Z, et al. Multi-task cost-sensitive-convolutional neural network for car detection. IEEE Access, 2019, 7: 98061 doi: 10.1109/ACCESS.2019.2927866 [9] Wu Y W, Sui Y, Wang G H. Vision-based real-time aerial object localization and tracking for UAV sensing system. IEEE Access, 2017, 5: 23969 doi: 10.1109/ACCESS.2017.2764419 [10] Rozantsev A, Lepetit V, Fua P. Flying objects detection from a single moving camera // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, 2015: 4128 [11] Girshick R. Fast R-CNN // Proceedings of the IEEE International Conference on Computer Vision. Santiago, 2015: 1440 [12] Ren S, He K, Girshick R, et al. Faster r-cnn: towards real-time object detection with region proposal networks // Advances in Neural Information Processing Systems. Canada, 2015: 91 [13] Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector // European Conference on Computer Vision. Amsterdam, 2016: 21 [14] Redmon J, Farhadi A. Yolov3: an incremental improvement[J/OL]. arXiv preprint (2018-04-08)[2019-09-10]. https://arxiv.org/abs/1804.02767 [15] Redmon J, Farhadi A. YOLO9000: better, faster, stronger // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, 2017: 7263 [16] Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, 2016: 779 [17] Coluccia A, Fascista A, Schumann A, et al. Drone-vs-Bird detection challenge at IEEE AVSS2019// 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). Taipei, 2019: 1 [18] Liu H, Wei Z Q, Chen Y T, et al. Drone detection based on an audio-assisted camera array // 2017 IEEE Third International Conference on Multimedia Big Data (BigMM). Laguna Hills, 2017: 402 [19] Mezei J, Fiaska V, Molnár A. Drone sound detection // 2015 16th IEEE International Symposium on Computational Intelligence and Informatics (CINTI). Budapest, 2015: 333 [20] Nguyen P, Ravindranatha M, Nguyen A, et al. Investigating cost-effective rf-based detection of drones // Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use. Singapore, 2016: 17 [21] Lin T Y, Maire M, Belongie S, et al. Microsoft coco: common objects in context // European Conference on Computer Vision. Zurich, 2014: 740 [22] Deng J, Dong W, Socher R, et al. Imagenet: a large-scale hierarchical image database // 2009 IEEE Conference on Computer Vision and Pattern Recognition. Miami, 2009: 248 [23] Kingma D P, Ba J. Adam: a method for stochastic optimization[J/OL]. arXiv preprint (2017-01-30)[2019-09-10]. https://arxiv.org/abs/1412.6980 -

 點擊查看大圖
點擊查看大圖
圖(6) / 表(1)
計量
- 文章訪問數: 3215
- HTML全文瀏覽量: 3328
- PDF下載量: 228
- 被引次數: 0
